11. (11分)在“测定金属导体的电阻率”的实验中,待测金属导线的电阻Rx 约为5
(11分)在“测定金属导体的电阻率”的实验中,待测金属导线的电阻Rx 约为5 .实验室备有下列实验器材
.实验室备有下列实验器材
A.电压表V1(量程3V,内阻约为15K)
B.电压表V2
(量程15V,内阻约为75K)
C.电流表A1(量程3A,内阻约为0.2)
D.电流表A2(量程600mA.,内阻约为1)
E.变阻器R1
(0-100,0.3A)
F.变阻器R2
(0~2000,0.1 A)
G.电池E(电动势为3V,内阻约为0.3)
H.开关S,导线若干
(1)为提高实验精确度,减小实验误差,应选用的实验器材有 。
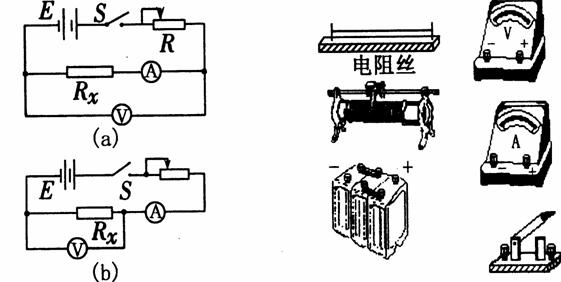 (2)为减小实验误差,应选用下图中
(填“a”或“b”)为该实验的电原理图,并按所洗择的电原理图把实物图用导线连接起来.
(2)为减小实验误差,应选用下图中
(填“a”或“b”)为该实验的电原理图,并按所洗择的电原理图把实物图用导线连接起来.
(3)若用刻度尺测得金属丝长度为60.00cm,用螺旋测微器测得导线的直径为0.635mm,两电表的示数分别如下图所示,则电阻值为
,电阻率为 ___________。

10.(1)在“研究共点力的合成”实验中,可减小实验误差的措施有( )
 A.两个分力F1、F2间夹角要尽量大些
A.两个分力F1、F2间夹角要尽量大些
B.两个分力F1、F2的大小要尽量大些
C.拉橡皮筋时,橡皮筋、细绳和弹簧秤应贴近图板,并且平行于图板
D.实验前,先把所用的两个弹簧秤的钩子相互钩住,平放在桌子上,向相反方向拉动,检查读数是否相同
(2)用DIS研究机械能守恒定律。将实验装置中的光电门传感器接入数据采集器,测定摆锤在某一位置的瞬时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度,求得摆锤在该位置的重力势能,进而研究势能和动能转化时的规律。实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认,不必输入。现某位同学要测定摆锤在D点的瞬时速度。其实验装置如图(1)所示,接着他点击“开始记录”,同时让摆锤从图中所示位置释放,计算机将摆锤通过光电门传感器的速度自动记录在表格的对应处,如图(2)。


|
|
①请指出该同学实验中的错误之处:
②摆图(2)中计算机记录的数据与真实值相比将
(填“偏大”、“偏小”或“仍准确”)
9. 实验室经常使用的电流表是磁电式仪表。
实验室经常使用的电流表是磁电式仪表。
这种电流表的构造如图甲所示。蹄形磁铁
和铁芯间的磁场是均匀地辐向分布的。当
线圈通以如图乙所示的电流,下列说法正
确的是
( )
A.线圈转到什么角度,它的平面都跟磁
感线平行
B.线圈转动时,螺旋弹簧被扭动,阻碍
线圈转动
C.当线圈转到如图乙所示的位置,b端受到的安培力方向向上
D.当线圈转到如图乙所示的位置,安培力的作用使线圈沿顺时针方向转动
|
8.如图所示,质量分别为m1、m2的两个物块间用一轻弹簧连接,放在倾角为θ的粗糙斜面上,物块与斜面间的动摩擦因数均为μ.平行于斜面、大小为F的拉力作用在m1上,使m1、m2一起向上作匀加速运动,斜面始终静止在水平地面上,则 (
)
 A.弹簧的弹力为
A.弹簧的弹力为
B.弹簧的弹力为+μm2gsinθ
C.地面对斜面的摩擦力水平向左
D.地面对斜面的摩擦力水平向右
7.如图甲所示,在空间存在一个变化的电场和一个变化的磁场,电场的方向水平向右(图甲中由B到C),场强大小随时间变化情况如图乙所示;磁感应强度方向垂直于纸面、大小随时间变化情况如图丙所示。在t=1s时,从A点沿AB方向(垂直于BC)以初速度v0射出第一个粒子,并在此之后,每隔2s有一个相同的粒子沿AB方向均以初速度v0射出,并恰好均能击中C点,若AB=BC=l,且粒子由A运动到C的运动时间小于1s。不计空气阻力,对于各粒子由A运动到C的过程中,以下说法正确的是 ( )
A.电场强度E0和磁感应强度B0的大小之比为3 v0:1
B.第一个粒子和第二个粒子运动的加速度大小之比为1:3
C.第一个粒子和第二个粒子运动的时间之比为π:2
D.第一个粒子和第二个粒子通过C的动能之比为 1:5
6. 质量相等的两木块A、B用一轻弹簧栓接,静置于水平地面上,如图(a)所示。现用一竖直向上的力F拉动木块A,使木块A向上做匀加速直线运动,如图(b)所示。从木块A开始做匀加速直线运动到木块B将要离开地面时的这一过程,下列说法正确的是(设此过程弹簧始终处于弹性限度内
)
质量相等的两木块A、B用一轻弹簧栓接,静置于水平地面上,如图(a)所示。现用一竖直向上的力F拉动木块A,使木块A向上做匀加速直线运动,如图(b)所示。从木块A开始做匀加速直线运动到木块B将要离开地面时的这一过程,下列说法正确的是(设此过程弹簧始终处于弹性限度内
)
A.力F一直增大
B.弹簧的弹性势能先减小后增大
C.木块A的动能和重力势能之和先增大后减小
D.两木块A、B和轻弹簧组成的系统的机械能先增大
后减小
5. 如图所示,电源的电动势为E,内阻r不能忽略。A、B是两个相同的小灯泡,L是一个自感系数相当大的线圈。关于这个电路的以下说法正确的是 ( )
 A.开关闭合到电路中电流稳定的时间内,A灯立刻亮,而后
A.开关闭合到电路中电流稳定的时间内,A灯立刻亮,而后
逐渐变暗,最后亮度稳定
B.开关闭合到电路中电流稳定的时间内,B灯立刻亮,而后
逐渐变/暗,最后亮度稳定
C.开关由闭合到断开瞬间,A灯闪亮一下再熄灭
D.开关由闭合到断开瞬间,电流自左向右通过A灯
4. 如图,空间存在水平向左的匀强电场和垂直纸面向里的匀强磁场,电场和磁场相互垂直。在电磁场区域中,有一个竖直放置的光滑绝缘圆环,环上套有一个带正电的小球。O点为圆环的圆心,a、b、c为圆环上的三个点,a点为最高点,c点为最低点,Ob沿水平方向。已知小球所受电场力与重力大小相等。现将小球从环的顶端a点由静止释放。下列判断正确的是 ( )
 A.当小球运动的弧长为圆周长的1/4时,洛仑兹力最大
A.当小球运动的弧长为圆周长的1/4时,洛仑兹力最大
B.当小球运动的弧长为圆周长的1/2时,洛仑兹力最大
C.小球从a点到b点,重力势能减小,电势能增大
D.小球从b点运动到c点,电势能增大,动能先增大后减小
3. m为在水平传送带上被传送的小物体(可视为质点),A为终端皮带轮,如图所示,已知皮带轮半径为r,传送带与皮带轮间不会打滑。当m可被水平抛出时,A轮每秒的转数最少是 ( )
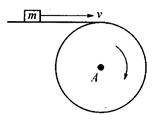 A.
A. B.
B.
C. D.
D.
2.模块机器人具有三个部分,它们分别是传感器、控制器和执行器。模块机器人的控制器内存有5种控制方法,可使用的传感器大致有5类,列表如下
|
序号 |
控制方法 |
序号 |
传感器 |
|
01 |
即时控制 |
01 |
位移传感器 |
|
02 |
延时控制 |
02 |
声传感器 |
|
03 |
“与”门控制 |
03 |
温度传感器 |
|
04 |
“或”门控制 |
04 |
光传感器 |
|
05 |
“非”门控制 |
05 |
磁传感器 |
执行模块为小灯模块、电动机模块。某位同学要设计一个装置,当有光照射且有声音时,电动机才会转,则应选择的控制序号和传感器序号正确的是 ( )
A.01,02 04 B.04,03 05 C.03,02 04 D.02, 03 04
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com