1.10 30
24.(14分)三只灯泡L1、L2和L3的额定电压分别为1.5 V、1.5 V和3.0 V,它们的额定电流都为0.5 A.若将它们连接成图1、图2所示电路,闭合电键s后灯泡都能正常发光,且图1中伏特表示数为15.0v,图2中总阻值为8 的滑动变阻器R3的滑片p恰滑至中点.电路中电源电动势E和内阻r未知.
的滑动变阻器R3的滑片p恰滑至中点.电路中电源电动势E和内阻r未知.
(1) 计算图1电路中的总电流和电阻R2消耗的电功率;
(2) 分析比较图1与图2电路哪个更节能;
(3) 计算电路中电源电动势E和电源内阻r.
09-01高三年级教学质量检测物理试卷答案及评分标准
23.(12分)辩析题水平面内固定一U形光滑金属导轨,轨道宽1m,导轨的左端接有R=0.4Ω的电阻,导轨上放一阻值为R0=0.1Ω的导体棒ab,其余电阻不计,导体棒ab用水平线通过定滑轮吊着质量M=0.2 kg的重物,空间有竖直向上的匀强磁场,如图所示.已知t=0时,B=1T, ,此时物体在地面上且连线刚好被拉直,若磁场以
,此时物体在地面上且连线刚好被拉直,若磁场以 =0.1 T/s增加,请问:经过一段时间物体是否能被拉动?若不能,请说明理由;若能,请求出经过多长时间物体才被拉动.
=0.1 T/s增加,请问:经过一段时间物体是否能被拉动?若不能,请说明理由;若能,请求出经过多长时间物体才被拉动.
以下为某同学的解答:
因为穿过回路的磁通量发生变化,产生感应电流,ab受到向左的安培力作用.当安培力大于或等于被吊物体的重力时,重物才能被拉动.
 回路产生的感应电动势为:
回路产生的感应电动势为:
ab受到向左的安培力为: ,代入相关数据后,发现安培力为恒力且F安<Mg,因此该同学得出的结论是:所以无论经过多长时间,物体都不能被拉动.
,代入相关数据后,发现安培力为恒力且F安<Mg,因此该同学得出的结论是:所以无论经过多长时间,物体都不能被拉动.
请问,该同学的结论是否正确?若正确,求出有关数据,若不正确,请指出错误所在并求出正确结果.
22. (l2分)如图所示,在倾角为θ的斜面上,一物块通过轻绳牵拉压紧弹簧.现将轻绳烧断,物块被弹出,与弹簧分离后即进入足够长的N N / 粗糙斜面(此前摩擦不计),沿斜面上滑达到最远点位置离N距离为S.此后下滑,第一次回到N处,压缩弹簧后又被弹离,第二次上滑最远位置离N距离为S/2.求:
(l2分)如图所示,在倾角为θ的斜面上,一物块通过轻绳牵拉压紧弹簧.现将轻绳烧断,物块被弹出,与弹簧分离后即进入足够长的N N / 粗糙斜面(此前摩擦不计),沿斜面上滑达到最远点位置离N距离为S.此后下滑,第一次回到N处,压缩弹簧后又被弹离,第二次上滑最远位置离N距离为S/2.求:
(1)物块与粗糙斜面间的动摩擦因素;
(2)物体最终克服摩擦力做功所通过的路程.
21. ( 12分) 如图所示,一块质量为0.6kg均匀平板AB长0.8m,其左端搁在水平地面上,板与地面的夹角为370,板中心C垂直固定在支架上,支架长OC为0.3m,支架下端与水平固定转轴O连接.在平板A点处有一质量为0.5kg的小物体m以初速v0沿板向上运动,物体与平板间的动摩擦因数为0.2.试求:
( 12分) 如图所示,一块质量为0.6kg均匀平板AB长0.8m,其左端搁在水平地面上,板与地面的夹角为370,板中心C垂直固定在支架上,支架长OC为0.3m,支架下端与水平固定转轴O连接.在平板A点处有一质量为0.5kg的小物体m以初速v0沿板向上运动,物体与平板间的动摩擦因数为0.2.试求:
(1)平板所受的重力的力矩;
(2)小物体运动到距B端多远恰能使平板翻转?
(3)若要保证平板不翻倒,给物体的初速度v0不能超过多大?
20. (10分)如图所示,放置在水平地面上一个高为40cm、质量为35kg的金属容器内密闭一些空气,容器侧壁正中央有一阀门,阀门细管直径不计.活塞质量为10kg,横截面积为60cm2.现打开阀门,让活塞下降直至静止.不计摩擦,不考虑气体温度的变化,大气压强为1.0×105Pa .活塞经过细管时加速度恰为g.求:
(10分)如图所示,放置在水平地面上一个高为40cm、质量为35kg的金属容器内密闭一些空气,容器侧壁正中央有一阀门,阀门细管直径不计.活塞质量为10kg,横截面积为60cm2.现打开阀门,让活塞下降直至静止.不计摩擦,不考虑气体温度的变化,大气压强为1.0×105Pa .活塞经过细管时加速度恰为g.求:
(1)活塞静止时距容器底部的高度;
(2)活塞静止后关闭阀门,对活塞施加竖直向上的拉力,是否能将金属容器缓缓提离地面?(通过计算说明)
19.(7分)在科技活动中某同学利用自制的电子秤来称量物体的重力,如图所示,为电子秤的原理图.托盘和弹簧的质量均不计,滑动变阻器的滑动端与弹簧上端连接,当托盘中没有放物体时,电压表示数为零;当托盘中的物体的质量改变时,电压表示数发生改变,从而测出物体的质量.设变阻器的总电阻为R,总长度为l,电源电动势为E,内 阻不计.弹簧产生的弹力与弹簧压缩量x成正比,即F=k.x(k为常数),不计一切摩擦和其他阻力,电压表为理想电表.
 (1)根据上述原理,电压表应接在________________两端.
(1)根据上述原理,电压表应接在________________两端.
(2)要获得电压表的满量程称重,制作上述“电子秤”时,电源、限流电阻R0、变阻器R、电压表等可从下列器材中选择________________________(填器材编号).
A、电动势为9V、内阻不计的电池;B、电动势为3V、内阻不计的电池;C、阻值为1KW定值电阻;D、阻值为100W的定值电阻;E、最大阻值为50W变阻器;F、最大阻为10W的变阻器;G、量程为0~3V的电压表;H、量程为0~15伏的电压表.
(3)当托盘上放上某物体时,所放物体的质量m与电压表的示数U的关系是:m=___________________.(用相应物理量符号表示)
18.(6分)数字信息系统(DIS)被广泛应用在物理实验中,该系统可以迅速测量、处理数据,并自动生成图像.如图(a)所示,一条形磁铁固定在水平转台上,磁铁长度等于圆台直径,一磁传感器放置在转台边缘,磁传感器可测量所在位置的磁感应强度.实验后显示器得出曲线如图(b)所示.图中横坐标表示时间,纵坐标表示磁感应强度.
(1)由以上信息可知磁铁所做的运动是____________________.
(2)曲线最高点的纵坐标表示____________________,曲线最低点的纵坐标表示____________________.
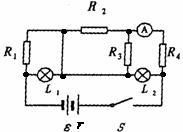
17.(7分)某同学在做电路实验时,按如图所示的电路图连接了电路,其中R1=12Ω,R4=4Ω,R2与R3数值未知, 灯L1与L2均标明“6V,3W”字样.闭合电键S,两灯均正常发光.
(1)此时A表的读数为________A;
后来他断开电键S,将R1与R4的位置互换,其他电路不动,再闭合电键S时,发现电路出了一个故障,但A表仍有读数,示数为0.56A.
(2)请说明发生了什么故障_________________________________,请分析产生故障的原因:___________________________________________________________________________;
(3)根据以上数据,该同学计算得到电源电动势ε为_________v,电源内阻r为______Ω.
16.(4分)模块机器人具有三个部分,它们分别是传感器、控制器和执行器.模块机器人的控制器内存有5种控制方法;可使用的传感器大致有5类,列表如下
|
序号 |
控制方法 |
序号 |
传感器 |
|
01 |
即时控制 |
01 |
位移传感器 |
|
02 |
延迟控制 |
02 |
声传感器 |
|
03 |
“与”门控制 |
03 |
温度传感器 |
|
04 |
“或”门控制 |
04 |
光传感器 |
|
05 |
“非”门控制 |
05 |
磁传感器 |
执行器模块为小灯模块、电动机模块.
 某同学要设计一个装置,当有光照射且有声音时,电动机才会转,则应选择的控制器序号为__________,应使用的传感器序号为_________________.
某同学要设计一个装置,当有光照射且有声音时,电动机才会转,则应选择的控制器序号为__________,应使用的传感器序号为_________________.
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com