1、定滑轮实质是个等臂杠杆。使用定滑轮不省力,但是能改变力的的方向 。动滑轮实质是个动力臂为阻力臂2倍的杠杆,根据杠杆的平衡条件,动滑轮能省一半力。
6、(06泉州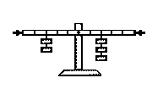 )在“探究杠杆平衡条件”实验中:
)在“探究杠杆平衡条件”实验中:
(1)实验前,先把杠杆的中点支在支架上,调节两端的平衡螺母,使杠杆在___________________位置
平衡。(图中杠杆上每格距离相等)
(2)实验中,改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,这样做的目的是:_____________________________________。
(3)如图17所示,杠杆处于平衡状态。如果在支点两侧的钩码下方分别再挂一个等重的钩码后,杠杆____________保持平衡(选填“能”或“不能”)
5.
 (06大连)图5是用杠杆提起重物的示意图。请画出拉力F1(方向竖直向上)的力臂,并画出挂重物的绳对杠杆的拉力F2的示意图。
(06大连)图5是用杠杆提起重物的示意图。请画出拉力F1(方向竖直向上)的力臂,并画出挂重物的绳对杠杆的拉力F2的示意图。
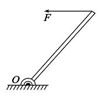
4、(06北京)如图13所示,O点为杠杆的支点,请画出力F的力臂,并用字母L表示。
3、(06江西)生活和生产中有许多不同类型的杠杆,如图7所示的托盘天平属于 杠杆,缝纫 机踏脚板属于 杠杆,铡刀属于
杠杆.
机踏脚板属于 杠杆,铡刀属于
杠杆.
2、 (06海淀)如图15所示,某人用一根轻质木棒挑着为120N的物体站在水平 地面上,木棒保持水平,棒AB长为1.2m,重物悬挂处离肩膀距离BO为0.8m,则手在A端对木棒竖直向下的作用力大小为_______N。
(06海淀)如图15所示,某人用一根轻质木棒挑着为120N的物体站在水平 地面上,木棒保持水平,棒AB长为1.2m,重物悬挂处离肩膀距离BO为0.8m,则手在A端对木棒竖直向下的作用力大小为_______N。
1、(06海珠)如图1所示,下列器件中属于省力杠杆的是( )

例1:(06北京)如图2所示的四种用具中,属于费力杠杆的是

例2:(06南充)不等臂直杠杆在动力和阻力作用下,已处于平衡状态,采用下列办法不能使杠杆平衡的是( )
A、在杠杆上再施加一个力,使这个力的作用线通过杠杆的中点,但不通过支点。
 B、在杠杆上再施加一个力,使这个力的作用线通过支点
B、在杠杆上再施加一个力,使这个力的作用线通过支点
C、使动力和阻力同时减小到原来的1/2
D、使动力臂和阻力臂同时变为原来的2倍
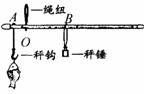
例3:(06广州) 用杆秤(如图8)测量鱼的质量,当秤钩挂在A点,绳纽挂在O点(支点),秤锤挂在B点时杆秤处于平衡状态.AO是10cm,BO是30cm,秤锤的质量是0.5kg,鱼的质量是 kg.
 例4:(06锦州)请在图5中画出用瓶起子启瓶盖的动力F1的力臂L1和阻力F2。
例4:(06锦州)请在图5中画出用瓶起子启瓶盖的动力F1的力臂L1和阻力F2。
例5 (06无锡)在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在 位置平衡,这样做是为了便于测量 ;如发现杠杆左端偏高,则可将右端的平衡螺母向 调节,或将左端的平衡螺母向 调节。

上图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长
5cm,部分实验数据已记录在下表中。
|
实验次数 |
动力F1/N |
动力臂L1/cm |
阻力F2/N |
阻力臂L2/cm |
|
1 |
1.5 |
10 |
1 |
|
|
2 |
1 |
20 |
|
10 |
|
3 |
1 |
20 |
1.5 |
10 |
(1)请将表格中的实验数据补充完整。
(2)小明的第3次实验存在错误,其错误是 。
4、应用:
|
名称 |
结 构 特 征 |
特 点 |
应用举例 |
|
省力 杠杆 |
动力臂 大于 阻力臂 |
省力、 费距离 |
撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀 |
|
费力 杠杆 |
动力臂 小于 阻力臂 |
费力、 省距离 |
缝纫机踏板、起重臂 人的前臂、理发剪刀、钓鱼杆 |
|
等臂 杠杆 |
动力臂等于阻力臂 |
不省力 不费力 |
天平,定滑轮 |
说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
2、研究杠杆的平衡条件:
a) 杠杆平衡是指:杠杆静止或匀速转动。
b) 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。
c) 结论:杠杆的平衡条件(或杠杆原理)是:
动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2 也可写成:F1 / F2=l2 / l1
解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。)
解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com